


La Monture est enfin opérationelle.
Monture
destinée à l’astrophotographie.
introduction
Qu’est ce qu’une bonne image ?
Une bonne image, dans l’absolu, en dehors des considérations esthétique, sera une image dont la résolution a été maximisée, elle rendra au mieux compte de la réalité scientifique d’un objet astronomique.
Etant assez peu compétant, je passerai rapidement sur les notions de signal et de bruit, dont on retiendra surtout que l’important est d’obtenir un rapport signal sur bruit (rsb) le plus important possible.
Revenons sur la résolution, l’un des meilleur indice de la
résolution d’une étoile est
Notre but sera donc d’avoir une FWHM la plus faible possible !

(sources : http://reductionism.net.seanic.net/ObservingTips/ObsgTips.html )
Les obstacles qui vont nous empêcher d’obtenir une bonne FWMH seront de différentes nature :
-Dans nos régions, on prendra en compte la turbulence atmosphérique générée par les reliefs alpins
-la turbulence locale dont l’origine est dûe au gradient thermique entre les matériaux chauffés par le soleil du jour et l’air frais descendant des montagnes la nuit, ce gradient sera plus important en été
-les défauts optiques d’alignement, de polissage, de déformations ou contraintes sur le miroir pour un télescope.
-etc, etc…
-et enfin le suivi de notre montre, point que je vais détailler dans cet article.
Pourquoi le suivi est-il important ?
La photographie astronomique ayant des cibles extrêmement peu lumineuse, nous seront amenés à intégrer le signal de notre capteur sur un maximum de temps pour augmenter au maximum ce signal, et à multiplier le nombre de pose pour obtenir le meilleur rsb possible.
Or, le mouvement apparent du ciel nous obligera à disposer d’un système de suivi permettant au capteur de toujours percevoir exactement la même portion de ciel sur les mêmes pixels.
On se devra donc d’avoir une monture de bonne qualité, si l’on veut pouvoir être en mesure de poser le plus longtemps possible sur une cible donnée.
Pour se donner une idée de l’importance de la qualité du suivi en astrophotographie, faisont une simple comparaison :
Les fortes turbulences atmosphérique n’engendrent pas de bougés supérieur à 2" ou 3" , alors qu’une monture subissant des flexions ou un tube long bougeant sous l’effet du vent peut provoquer des bougés supérieur à une à plusieurs dizaines de secondes d’arc !!!
On voit peut donc concevoir que la qualité d’une monture dans un setup astrophoto fait parti des incontournables.
Personnellement, j’ai considéré ce paramètre comme le plus important étant donné que j’ai construit ma propre monture avant de posséder mon premier réflexe numérique, et je ne possède toujours pas d’optique dédiée à l’astrophoto !!!

Après cette introduction, je vais décrire ma propre monture, dont je trouve qu’elle représente un rapport qualité prix assez acceptable.
LA MECANIQUE
Cette monture a été conçue selon le schéma bien classique décrit pas Pierre bourge, son axe horaire est constitué par une traverse d’essieu de 2cv en acier de 62mm de diamètre.

Son axe de déclinaison est consitué par deux cylindres en
bronze de

Le cadre principal est constitué de tubes en acier de section carré et la fourche est réalisé en ctp de 19mm d’épaisseur.
Passons à l’entrainement :
L’entrainement des axes de déclinaison de d’ascension droite est constitué par une tige fileté tirant un écrou, le tout entrainé par un moteur par l’intermédiaire d’une liaison poulie/courroie.

(sur la photo on peut voir un tube de graisse au lithium que j'étale avec un pinceau pour entretenir le filetage)
A propos du cœur de la monture : son entrainement par secteur lisse :
il est constitué d’un écrou en bronze et d’une tige fileté de 360mm de longueur, possédant un filet de 2mm, pour un diamètre de 5cm.
On peut noter que la durée maximale de suivi sans remise à zero de l’écrou tracteur sera de 360/2=180minutes soit 3heures.
Le secteur lisse est équivalent à une roue dentée virtuelle de 457mm de rayon est relié à l’écrou par un ruban en acier.

Principe de fonctionnement de l'entrainement par secteur lisse (image tirée de http://serge.bertorello.free.fr/mecano/entraint.html )
Le fait d’utiliser un système d’un si grand diamètre (imaginez une roue dentée de 90cm !!!) va nous permettre de minimiser l’erreur périodique de notre vis sans fin.
On peut calculer la réduction inhérente à ce système :
la circonférence de la roue virtuelle est de 2*π*457=2871mm et la circonférence divisé par le filet de la vis donne 2871/2=1435, or ce nombre représente à une faible erreur près le nombre de minutes dans une journée.
Pour suivre le mouvement de rotation apparent du ciel on devra dont imprimer à notre tige filetée une rotation d’exactement un tour par minute.
Cette rotation sera assurée par un moteur, deux poulies et une courroie.
L’ensemble poulie courroie assure une réduction de ¼.
Notons que si la mise en station était parfaite, le moteur de rattrapage en déclinaison serait absolument inutile, en pratique il va servir, mais son importance ne sera pas capitale comme l’entrainement horaire.
Je suis d'ailleur à la recherche d'un adhérent (anti-patinage) pour augmenter la friction entre la courroie et les poulies.

Vous pourrez trouver nombre d’informations relatives à cette réalisation sur le site de Serge Bertorello
(http://serge.bertorello.free.fr/mecano/entraint.html)
L’ELECTRONIQUE
Le pilotage des moteur.
Les moteurs sont de type pas à pas 400 pas, assurant une bonne fiabilité et qui ne nécessiteront pas un asservissement complexe comportant des encodeurs.
Ce type de moteur nous permettra d’accéder à de très faibles vitesses, en basculant sur l’électronique le problème des erreurs périodiques dues aux engrenages de réduction tout en permettant de garder un couple acceptable.
Les moteurs que je possède ont été achetés d’occasion, ce sont des nanotec, 400 pas, 4v ; 1.2 ampère ; 3.3 ohm par phase.
Le courant de 1.2 ampère (puissance : 5W) fait que les moteurs ont tendance à chauffer en fonctionnement, mais cet échauffement reste acceptable et n’entraine pas de dilatation du reste de la mécanique.
J’utilise actuellement une alimentation stabilisée pour générer assez de courant pour alimenter ma carte de pilotage, ce qui n’est pas superflu au vu de la consomation dépassant allègrement les 2.5 ampères.

Ici, le dos du boitier avec son ventilateur de refroidissement (initialment installé pour éviter que les résistances de puissance grillent le reste du circuit).
Revenons aux moteurs, la technologie de fonctionnement des moteurs pas à pas consiste à alimenter en courant 4 bobines successivement pour faire pivoter un aimant (le rotor) jusqu’à ce qu’il soit aligné avec le champ généré par l’induction des bobine.
Le rotor va donc prendre des positions fixes, ces positions sont appelées PAS, dans mon cas, le rotor comportant un grand nombre « d’aimants » j’ai accès à 400 positions fixes par tour.
Dans mon cas, le passage d’un pas à l’autre doit se faire (400*4)/60 = 26.66 fois par seconde, s’il était fait de manière brusque, cela engendrerait un bougé de 15/26.66=0.565 »
Cette valeur est largement acceptable, mais j’ai tout de même décidé d’utiliser le système picastro, qui se distingue par sa gestion logicielle (électronique embarqué avec microcontroleur pic 18F452) de la génération de 16 micro-pas par PWM (ou modulation de largeur d’impulsion) avec possibilité de linéariser chacun de ces micropas.
Qu’est ce qu’un micropas ?
L’utilisation de micropas permet de créer des phases de déplacement intermédiaire entre chaque pas.
Au lieu d’alimenter chaque bobine une par une valeur maximale unique, on va l’alimenter par paliers ascendants successifs pendant que la bobine précédent est alimenté par paliers descendants, si le nombre de ces palier est réglé à 16, on aura des changement de pas 16fois plus doux !!!
Les pwm
La carte logique du système picastro permet de générer des pwm avec lesquels ont va moduler l’envoie de ces paliers. Au lieu d’envoyer un signal de 0 ou 5 volts, par exemple on va envoyer un signal de 0volt pendant 0.3microseconde et un signal de 5 volts pendant 0.7microseconde, lorsque ce signal, amplifié, entrera dans les bobines, il sera intégré et on obtiendra un signal de commande en échelons successifs « adouci ».
D’un point de vue informatique la géneration de pwm est gérée par interruption dans le microcontroleur, chaque interrruption donnant naissance à un état haut ou un état bas, à une fréquence avoisinant le kHz.


A gauche on voit que la gestion du rapport période état/période état bas nous permet de gérer une tension moyenne. A droite on voit comment le fait de faire varier ce rapport nous permet d'obtenir un signal quasi sinusoïdal.
Pour moi, le système picastro était un moyen simple et à la fois peu onéreux d’obtenir un système de pilotage de moteur pas à pas gérant les protocoles (lx200) le goto et l’autoguidage des principaux logiciel astronomiques.
La communication se fait par protocole RS232, passant par un port série (j’utilise un convertisseur usb-série) la carte logique comportant un max232 (composant convertissant les signaux normes rs232 en signaux de communication utilisable par le pic et inversement).
Le pic ayant des port Rx et Tx pour la communication, on va pouvoir envoyer des ordre via un pc pour l’asservissement, le go to et surtout l’autoguidage !
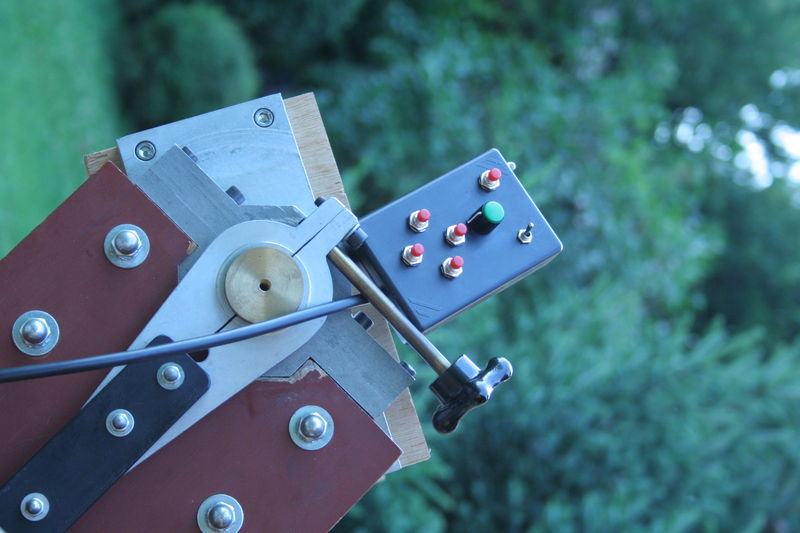
D’autres ports seront utilisé pour la communication avec la raquette de commande, les leds indiquant l’état du système, le moteurs de mise au point, l’entrée pec, etc etc….

On peut observer l'alimentation stabilisée en bas, et au dessus le boitier du picastro, avec le connecteur raquette, le connecteur série/pc, les leds de fonctionnements, et l'entrée 12V.
Les systèmes amateurs répondant à ce cahier des charges restent relativement peu nombreux.
Mettant déjà en parallèle les notions de pilotage de moteur par pwm, pont H, et écriture de programme en c pour pic dans le millieu de la robotique, j’ai donc décidé de fabriquer le système picastro.
La raquette de commande.
L’électronique et la mécanique finie, j’ai pu me mettre en phase de test, et plus particulièrement j’ai pu réaliser une mesure d’erreur périodique grâce au logiciel PEAS.
Pour ce test, la monture a été mise en station avec la méthode de bigourdan, pour facilier cette mise en station, j’ai tracé la ligne pôle celeste nord/sud de jour en relevant sur le sol l’ombre d’un fil à plomb à l’heure exacte du passage au méridien du soleil.

Ne disposant pas encore d’une optique spécifique à utiliser sur cette monture, j’y ai placé mon etx 125 avec sa propre monture azimutale, ne pouvant extraire le tube seul (il fallait pour cela des clés 6pans au format américain !!!) .

L’ensemble peut paraître assez
exotique ! Un défaut de stabilité va être induit par ce système, il
faudra donc prendre en compte ce dernier dans les mesures (en
particulier les vibrations à forte fréquence et faible amplitude seront
amplifiées)
Et donc, après avoir placé ma webcam sur le télescope à 1900mm de focale, le résulat tombe :

Une erreur allant de 5 à 8 secondes d’arc, avec une fft trahissant bien le fait que la période principale du defaut est de 1 minute.
L’origine de ce defaut ne m’a pas été difficile à cerner : en effet lors du montage de l’accouplement tige fileté/poulie j’avait remarqué que le trou foré à l’intérieur de la tige fileté permettant d’y introduire un axe pour fixer la poulie n’était pas exactement parallèle à l’axe de la tige.

On peut apercevoir sur l'agrandissement un grossier défaut de coaxialité de la pièce en laiton
Ce qui allait immanquablement générer une différence de vitesse, la poulie s’éloignant de la courroie de manière irrégulière.
Je pensais que cette erreur allait être « aplanie » par l’élasticité de la courroie mais je m’aperçoit que je vais devoir rectifier une pièce pour minimiser l’erreur de période 1 minute.
Cela dit le constat est plutôt positif, la comparaison avec une monture du commerce est parlante:

Monture Em200 de Takahashi, cette monture de très bonne qualité présente une erreur périodique de valeur à peu près semblable, cependant cette erreur est bien plus régulière, et a une période beaucoup plus élevée que sur ma monture (450 secondes au lieu de 60), ce qui lui permettra d’utiliser un pec plus facilement et de poser pendant plusieurs dizaines de secondes sans avoir de bougé visible.
Le tout dans une mécanique à toute épreuve, et bien plus transportable (il vous en coutera tout de même jusqu’à 6500euros).
Photo tirées du site http://demeautis.christophe.free.fr/ep/em200.htm que je vous invite à visiter pour plus d’info.
On peut aussi tenter une comparaison bien moins flatteuse, celle d’une monture à secteur lisse de construction personelle ayant une ep inférieure à 2".

(http://demeautis.christophe.free.fr/ep/lisse.htm)
Cela dit, quelques modifications sur la pièce incriminée devraient permettre de me rapprocher de cette courbe.
De plus j’ai réalisé un test d’autoguidage grâce au logiciel guidemaster qui s’est avéré très efficace, le suivi devrait donc être compatible avec l’astrophotographie au foyer d’instrument jusqu’à 2000mm de focale.
Il reste à évaluer avec précision les problèmes de flexions et/ou de vibrations, ces derniers m’ayant parut très minime avec la webcam à l’écran.
Le nouvel occupant rangé dans sa cabane :)




/https%3A%2F%2Fstorage.canalblog.com%2F97%2F70%2F161198%2F27533572_o.jpg)
/https%3A%2F%2Fstorage.canalblog.com%2F83%2F05%2F161198%2F27532407_o.jpg)
/https%3A%2F%2Fstorage.canalblog.com%2F53%2F49%2F161198%2F27525598_o.jpg)
/https%3A%2F%2Fstorage.canalblog.com%2F15%2F25%2F161198%2F24529278_o.jpg)